자동화 시스템이 전 세계적으로 확장됨에 따라 에너지 비용이 중요한 문제점으로 대두되고 있습니다. 많은 엔지니어가 이에 대해 논쟁을 벌입니다: 케이블 트롤리 또는 드래그 체인? 실제 데이터를 통해 노이즈를 차단해 보겠습니다.
드래그 체인 는 일반적으로 마찰 감소와 최적화된 이동 경로로 인해 케이블 트롤리보다 15~30% 적은 에너지를 소비합니다. 하지만 특정 애플리케이션에서는 이러한 이점이 달라질 수 있습니다.
작년에 미국에 본사를 둔 고객인 마르코(자동화 장비 조립업체)는 케이블 트롤리에서 당사의 플라스틱 드래그 체인. 그의 에너지 요금은 3개월 만에 22%가 감소했습니다. 그 이유를 알아보세요.
[목차]
드래그 체인은 어떻게 이동 중 에너지 낭비를 최소화할 수 있을까요?
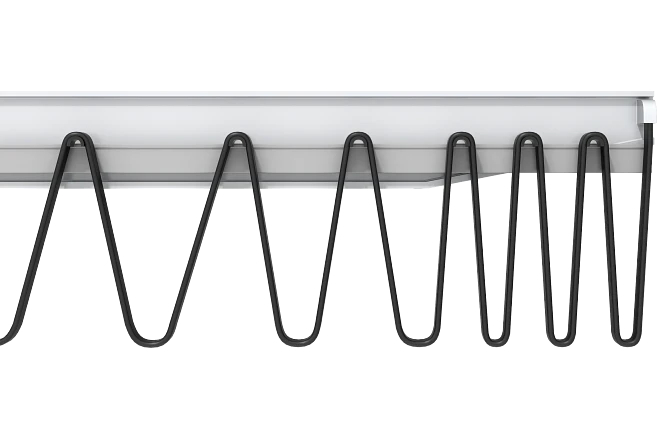
마찰은 에너지 효율의 소리 없는 살인자입니다. 드래그 체인은 밀폐된 트랙과 저저항 소재를 사용하여 기계적 마모를 줄입니다.
그리고 모듈식 설계 드래그 체인 (예 DOWE의 나일론 기반 에너지 체인1)는 부드럽고 예측 가능한 모션 경로를 생성하여 에너지 낭비를 초래하는 갑작스러운 방향 변경을 최소화합니다.

에너지 손실에 직접적인 영향을 미치는 재료 선택
| 재료 | 마찰 계수 | 이상적인 속도 범위 |
|---|---|---|
| Steel | 0.5-0.8 | 낮음에서 중간 |
| 나일론 | 0.2-0.4 | 중간에서 높음 |
| 하이브리드 폴리머 | 0.3-0.6 | 변수 |
고속 설정의 경우 고객은 나일론 기반 체인을 선호합니다. 독일의 한 자동차 공장은 DOWE의 나일론 체인을 도입한 후 에너지 사용량을 18% 절감했습니다. 유연한 케이블 트랙 로봇 팔의 경우
케이블 트롤리가 장거리 설치에서 더 에너지 집약적일까요?
케이블 트롤리는 직선형 레이아웃에서는 탁월하지만 복잡한 경로에서는 어려움을 겪습니다. 개방형 설계로 인해 공기 저항이 증가하고 가속/감속을 더 자주 해야 하기 때문입니다.
10미터를 초과하는 설치에서 케이블 트롤리는 종종 다음을 요구합니다. 30% 더 높은 모터 출력 를 사용하면 관성 및 정렬 문제로 인해 속도를 유지할 수 없습니다.
사례 연구: 포장 라인 개조
스페인의 한 고객(파블로, 42세)은 15미터 케이블 트롤리를 당사의 스틸 드래그 체인:
- 일일 에너지 소비량이 7.2kW에서 5.1kW로 감소했습니다.
- 유지보수 비용 40% 감소(더 이상 롤러가 잘못 정렬되지 않음)
"6개월 만에 ROI는 분명해졌습니다."라고 Pablo는 말합니다.
드래그 체인이 에너지 급증 없이 고속 자동화에 적응할 수 있을까요?
속도는 에너지 비효율을 증폭시킵니다. 드래그 체인은 회의적인 시각에 직면하지만 현대적인 디자인은 이를 극복합니다.
우리의 크레인 케이블 캐리어 가이드 롤러로 최대 5m/s의 속도를 처리하는 동시에 정밀 로봇 공학에 필수적인 12% 미만의 에너지 변동을 유지합니다.
에너지 급증을 방지하는 3가지 요인:
- 무게 분포: 중앙 집중식 케이블 배치로 펜듈럼 효과를 방지합니다.
- 윤활 주기: 자체 윤활 소재(예: IGUS에서 영감을 받은 기술)로 유지보수를 줄여줍니다.
- 사용자 지정: 프랑스 항공우주 고객을 위해 공기 저항을 27%까지 줄일 수 있는 테이퍼드 체인 링크를 개발했습니다.
결론
드래그 체인은 일반적으로 케이블 트롤리보다 에너지를 더 많이 절약하지만 상황에 따라 다릅니다. 무거운 하중/단순한 경로의 경우 하이브리드 솔루션이 유리할 수 있습니다. 원하는 무료 에너지 감사 를 설정하셨나요?
-
드래그 체인이 어떻게 마찰을 줄이고 모션 경로를 최적화하여 에너지를 절감하는지 알아보세요. ↩